

Running Gazebo with ROS
Launching Gazebo
Earlier, we ran Gazebo directly with the command, however this is running Gazebo separated from ROS. Running it with ROS support can be trickier, so we are provided with a ROS launch file that takes care of things for us. The command below will launch Gazebo, loading up a particular world environment (more on this in a moment) if we choose to specify it.
Spawning our robot
Once we have fixed up our URDF file, we want to run to publish it to the topic (as we’ve seen in the last few tutorials). Once this is up, we can run the command below which will spawn the robot into the gazebo
This will spawn the robot described by the URDF on and give it the name within Gazebo. We can also spawn robots directly from files or model databases, but in most scenarios we will have a description topic running already so we use that.
Using our own launch file
To simplify the process of all this, we can wrap it up in a launch file (as usual). The launch file below will run (with set), the Gazebo launcher, and the spawner script.
Pop-Up/Camp Gazebos
Truly portable and extremely temporary gazebos are those that can be erected and taken down in a matter of minutes. As their name implies, you can pop them up very quickly and with minimal effort.
The primary difference between pop-up gazebos and tents is height. Tents are designed with sleeping in mind. Camp gazebos are for standing adults. However, it’s no surprise that many tent manufacturers also make pop-up gazebos.
Pop-up or tent gazebos share 3 characteristics:
- Mesh sides for wall panels
- Fold up easily in a portable carrying bag
- Pre-built aluminum or steel frame
Compared with hardtop and soft top gazebos, they are:
- Endlessly customizable, including wall panels and doors
- Not intended to be left outside year-round
- Made from fire-retardant materials
Many people decide that a pop-up gazebo actually suits their needs at home. Others view it as a critical component for their home-away-from-home camp site. No matter your preference, pop-up gazebos give you most of the benefits of more permanent gazebo types at a fraction of the cost.
Under the Hood & Dealing with crashes
Before we wrap up, there are a couple of other things that are good to be aware of. As great as Gazebo is, it isn’t always the most stable software, especially with the ROS plugins, and before too long you’ll probably find yourself stuck and confused by something.
Server & Client
Gazebo is actually made up of two different programs, and . The server is actually the main part and handles running the simulation with all the physics etc. The client is the graphical interface, just a way for us to interact with the simulation that is occuring.
This means it’s possible to run a simulation on a computer without a display, or to have the server on one computer with the client on another, but as this is usually for more advanced users, the command (and launch files) are provided to cover the common case of running them together.
Terminal stuck after closing
After we close Gazebo we might not be able to type in our terminal anymore. This is (sometimes) because part of it has been shutdown but the launch file is still running. We need to Ctrl-C in the Gazebo terminal window to interrupt the process and stop it.
Can’t run Gazebo again after closing
If the above doesn’t work, or if it does work but Gazebo freezes on the next launch, there is probably a part that hasn’t stopped properly.
Usually the below command will take care of things (best to try without or first).
Commands such as and can help to track down processes.
Running multiple copies
If for some reason we want to run multiple copies of Gazebo we need to be careful as they will “see” each other and interact — just like if we were trying to run multiple ROS sessions. Here is an example of how to do this. Disclaimer, I’ve never tried this and don’t know if it works.
Stuck on launch screen
There are a few reasons that Gazebo can get stuck on the launch screen. A few of them are:
- It’s downloading models in the background. Wait for a few minutes, ensure your internet connection is good.
- There are old processes preventing the new one from starting. As mentioned above, kill the old processes.
- There is a problem initialising the 3D graphics. Check your graphics driver is set up properly.
- Some other issue — check the terminal window to see if there is an error message.
Газебо беседка. Проект беседки БК-0055 (с барбекю) , project pergola, Gazebo, shed
Команда архитекторов, предлагает вашемувниманию проекты готовых беседок, разных стилистических направлений,также мы выполняем проектирование по вашим индивидуальным пожеланиям
проект беседки БК-0055 (с барбекю), project pergola, gazebo, shed общая площадь беседки- 24,8 м. кв. эксплуатируемая площадь беседки-21,4 м.кв. габаритные размеры — 4 м. на 6,2 м. тип фундамента-монолитный ж/б материал наружной стены и опор-кирпич, бетон,дерево тип кровли-битумная черепица, керамика Наружная отделка цоколя -декоративный камень Стоимость проекта- 1500 грн.
проект беседки БК-0055 (с барбекю), project pergola, gazebo, shed общая площадь беседки- 24,8 м. кв. эксплуатируемая площадь беседки-21,4 м.кв. габаритные размеры — 4 м. на 6,2 м. тип фундамента-монолитный ж/б материал наружной стены и опор-кирпич, бетон,дерево тип кровли-битумная черепица, керамика Наружная отделка цоколя -декоративный камень Стоимость проекта- 1500 грн.
проект беседки БК-0055 (с барбекю), project pergola, gazebo, shed общая площадь беседки- 24,8 м. кв. эксплуатируемая площадь беседки-21,4 м.кв. габаритные размеры — 4 м. на 6,2 м. тип фундамента-монолитный ж/б материал наружной стены и опор-кирпич, бетон,дерево тип кровли-битумная черепица, керамика Наружная отделка цоколя -декоративный камень Стоимость проекта- 1500 грн.
проект беседки БК-0055 (с барбекю), project pergola, gazebo, shed общая площадь беседки- 24,8 м. кв. эксплуатируемая площадь беседки-21,4 м.кв. габаритные размеры — 4 м. на 6,2 м. тип фундамента-монолитный ж/б материал наружной стены и опор-кирпич, бетон,дерево тип кровли-битумная черепица, керамика Наружная отделка цоколя -декоративный камень Стоимость проекта- 1500 грн.
проект беседки БК-0055 (с барбекю), project pergola, gazebo, shed общая площадь беседки- 24,8 м. кв. эксплуатируемая площадь беседки-21,4 м.кв. габаритные размеры — 4 м. на 6,2 м. тип фундамента-монолитный ж/б материал наружной стены и опор-кирпич, бетон,дерево тип кровли-битумная черепица, керамика Наружная отделка цоколя -декоративный камень Стоимость проекта- 1500 грн.
Газебо днд это.
— Сэр Гийом, почему Вы жертвуете церкви 10% всех своих доходов?— Потому что мой отец, тоже доблестный рыцарь, сам всю жизнь жертвовал именно столько и мне завещал.— А почему он жертвовал?— Потому что он был по Второй редакции!
_____ . В конце далёких 60-х не столь уж молодой американец Гарри Гигакс (ну, или Гэри Гайгакс, если желаете) развлекал себя игрой в средневековые варгеймы. Рано или поздно гоняние отрядов кавалеристов, мечников и лучников ему осточертело и он начал вводить в игру всякие средневеково-фентезийные вундервафли. «Пусть это будет великан, атакующий как отряд пикинеров, а тут — архимаг, атакующий файрболлом как баллиста, а тут — летающая НЕХ с глазами и тентаклями, атакующая как дракон!». В конце концов, в 71-ом году всё это непотребство было собрано в отдельную книгу правил скирмиш-варгейма Chainmail («Кольчуга»). Теперь с великанами и драконами!
D&D , (Original) Dungeons and Dragons, OD&D (1974) — оригинальная система достаточно простых правил для воображаемого путешествия по подземельям с драконами. Изначально выпущенная тонкая книжка правил не содержала такого класса как «вор», зато имела классы «дварф», «эльф» и «полурослик» . Максимальный уровень персонажа был не выше смешного на наше время десятого, а полурослик например был вообще ограничен четвертым. Стандартная поставка включала полсотни довольно странных спеллов, пару типов волшебных палочек с аж сотней зарядов, пару десятков надёрганных откуда не попадя типов противников от эльфов до дервишев (причем первые могли набигать группами до 300 рыл), небольшую кучку из смеси унылых и читерских артефактов, и меддскилзные иллюстрации. Правила во многом ссылались на Chainmail и заметно отличались от последующих. Присутствие всем известных фэнтезийных существ давало повод троллить создателей обвинениями в плагиате с Толкина , хотя Гигакс утверждал, что влияние Профессора было минимальным.
Изготовленные на заказ беседки для вашего двора
Перейти к содержимому
Экономия ранней весной на весь февраль. Подумайте о весне и сэкономьте сотни с нашей МГНОВЕННОЙ скидкой от производителя! Смотрите подробности.
Сердце американского очарования
Хотите настроить беседку?
Сделай сам
Преобразите свой задний двор с помощью индивидуальной беседки
От побережья до побережья беседки украшают деревенскую зелень, задние дворы загородных ферм и сады больших поместий. Они напоминают нам о более простом времени — эпохе, когда мы больше наслаждались радостями жизни и намного меньше беспокоились.







Познакомьтесь с нашими беседками ручной работы, и вы почувствуете разницу. Всего один взгляд, и вы перенесетесь в прошлое. Закройте глаза, и вы можете услышать звуки духового оркестра, играющего на ступенях беседки в солнечный день Четвертого июля, или уловить запах домашнего яблочного пирога, остывающего на ближайшем подоконнике. Принесите одну из этих классических беседок домой сегодня и заново откройте для себя жизнь на свежем воздухе.
Настройте свою беседку сегодня
Деревянные беседки
Традиционные беседки амишей построены из дерева. Клиентам нравится внешний вид, ощущение и общее богатство, которое предлагает древесина. Древесину можно красить или морить и отполировать. Садовые беседки, построенные из дерева, также создают теплую домашнюю атмосферу.
- Богатый, традиционный внешний вид
- Можно окрашивать ИЛИ морить
- Изготовлен из обработанной под давлением пиломатериалов высшего сорта №1
- Ограниченная гарантия на десять лет
Исследовать деревянные беседки
Виниловые беседки
Виниловые беседки отличаются удобством и низкими эксплуатационными расходами, сохраняя при этом традиционный внешний вид. Наши виниловые садовые беседки — это современный взгляд на традиционные беседки. Четкие линии и блестящая отделка виниловых беседок представляют собой привлекательную альтернативу дереву.
- Элегантный современный внешний вид
- Ограниченная гарантия на десять лет
- Пиломатериал с виниловым покрытием Easy Clean
- Разработан, чтобы противостоять сильному ветру и тяжелым снеговым нагрузкам
Обзор виниловых беседок
Почему выбирают беседки Country Lane
Полностью настраиваемый
Каждая беседка изготавливается на заказ и полностью настраивается в соответствии с вашими требованиями. Выберите стиль, размеры, цвет и опции, чтобы сделать свою беседку индивидуальной.
Создайте свой собственный
Доставлено к вам домой
Мы отправляем в пределах континентальной части США безопасным перевозчиком. Вы также можете забрать комплект для беседки прямо у нас на нашем предприятии в Новой Голландии, штат Пенсильвания.
Наборы для беседок
Материалы премиум-класса ручной работы
Наши мастера-амиши используют только самые лучшие материалы для ручной сборки каждой беседки на нашем предприятии в округе Ланкастер. Это приводит к лучшему продукту, который гарантированно прослужит долго.
О Кантри Лейн
Простой в сборке комплект
Мы предоставляем все необходимое для установки вашей новой беседки с помощью инструментов, которые у вас уже есть. Каждый комплект поставляется с винтами, крепежными элементами, кронштейнами и пошаговой инструкцией по сборке для легкой установки.
Идеи для вашей беседки
«Спасибо, что помогли нам выбрать нашу новую перголу. Теперь мы можем использовать задний двор, который мы никогда не использовали раньше! Добавленная решетка обеспечивает много тени. Нам нравится сидеть снаружи и обедать с детьми. Мы выбрали вашу беседку из-за ее прочной конструкции и романтического ощущения. Большое спасибо.»
Дуг и Мэри
«Нам очень нравится павильон, в котором мы сидим ранним утром с кофе и просто наслаждаемся его красотой.
Gazebo robotics simulator with ROS
This tutorial is intended for roboticists that want to have realistic simulations of their robotic scenarios. Gazebo is a 3D simulator, while ROS serves as the interface for the robot. Combining both results in a powerful robot simulator.
With Gazebo you are able to create a 3D scenario on your computer with robots, obstacles and many other objects. Gazebo also uses a physical engine for illumination, gravity, inertia, etc. You can evaluate and test your robot in difficult or dangerous scenarios without any harm to your robot. Most of the time it is faster to run a simulator instead of starting the whole scenario on your real robot.
Originally Gazebo was designed to evaluate algorithms for robots. For many applications it is essential to test your robot application, like error handling, battery life, localization, navigation and grasping. As there was a need for a multi-robot simulator Gazebo was developed and improved.
This Tutorial was tested with an Ubuntu 12.10 with ROS Hydro and Gazebo-1.9.
Installation of Gazebo
For Gazebo there are also multiple options for installation. As I use an Ubuntu I selected the installation with precompiled binaries. Make sure you can launch “gzserver” and “gzclient” after the installation of Gazebo.
Gazebo is split up in two parts. The server part computes all the physics and world, while the client is the graphical frontent for gazebo. So if you want to save performance on your computer you could also execute all tests without the graphical interface. Although it looks very nice, it consumes a lot of resources.
Your Gazebo should be installed in:
or
if you installed Gazebo from sources.
After Gazebo and ROS have been installed it is time to install the bridge between them. With this bridge you can launch gazebo within ROS and dynamically add models to Gazebo. Depending on your Gazebo installation, there are different methods to continue.
If you have ROS Hydro you probably want to follow this guide to install the ROS Packages for Gazebo and look at the ‘Install Pre-Built Debians’ section.
If you do not have the ROS Version “Hydro” installed, you have to manually “git clone” the “gazebo_ros_pkgs”. The git url can be found on http://www.ros.org/wiki/gazebo_ros_pkgs. If git is not installed:
If you have some missing dependencies, the following two packages may help
If the cmake_modules are missing, “git clone” them in the sources of your catkin directory.
If everything worked you should be able to start Gazebo and ROS with (remember to source your environment):
You could also start them individually with gzserver and gzclient. If Gazebo is properly connected to ROS you should be able to the some published topics. Just type







in one of your favorite terminals to see, if there are some gazebo topics if the gzserver is running.
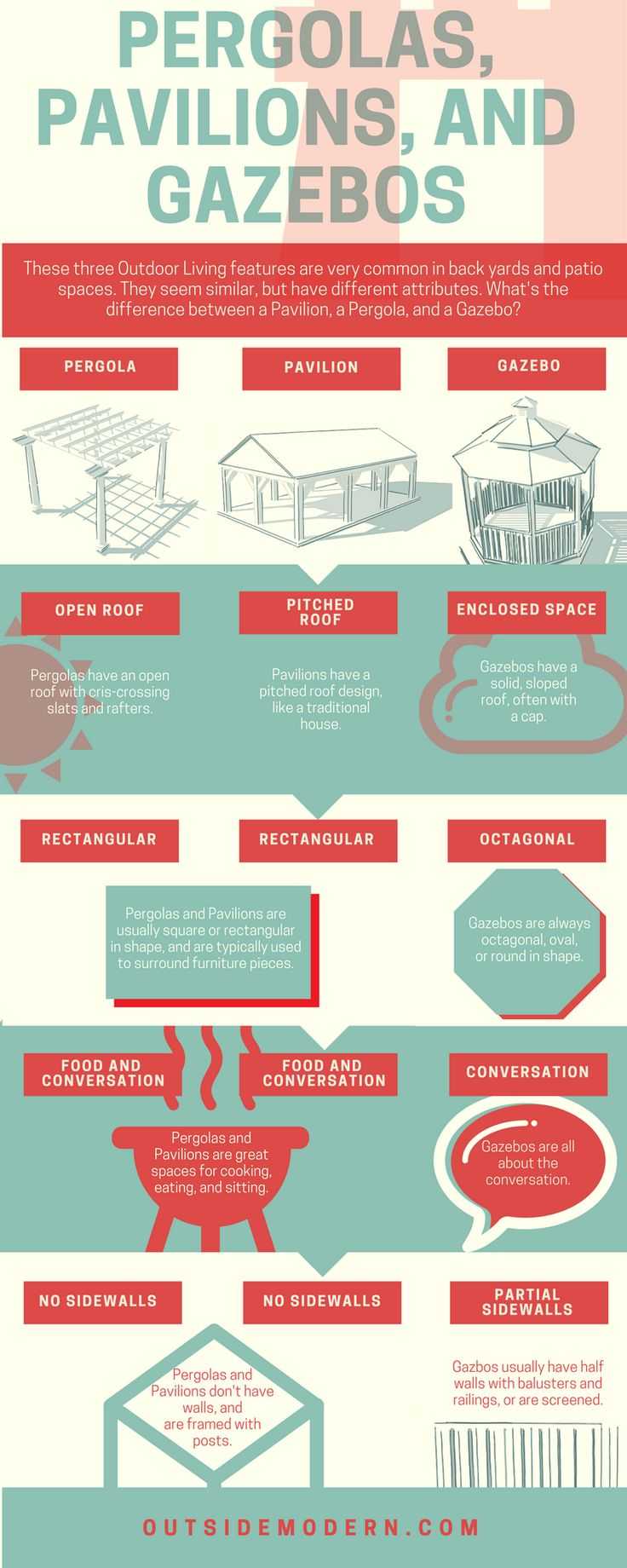
Hardtop Gazebos
Like the name implies, hardtop gazebos have a roof made from a solid material. With almost no popular exceptions, this material is either wood, vinyl, aluminum, steel or polycarbonate. This post delves into all of these materials and specifically addresses their durability.
With the exception of polycarbonate, the frames of hardtop gazebos are usually made from these same materials. Polycarbonate plastic is typically reserved for roofs because of its unique properties of both transparency (to let in filtered light) and durability (to withstand the weight of snow).
Curiously, some consider hardtop gazebos to also be “temporary” or “portable” gazebos because they don’t require a cement foundation to build on. But keep in mind that, depending on the material, some hardtop gazebos can weigh close to 600 lbs! There’s nothing portable or temporary about that.
As mentioned before, most hardtop gazebos are chosen for their year-round properties. A gazebo that stays cool in the hot sun while also weathering the rainy season is a true extension of your home and should be maintained as such.
Also like a home, you can add elements to your hardtop gazebo like a fire pit or BBQ. Remember that any elements that involve fire should only be added to hardtop gazebos, not soft top. (You can, however, add a BBQ inside a pop-up gazebo.)
If you’re looking to expand your living space to the outdoors and you’re committed to investing the upfront cost and periodic maintenance, a hardtop gazebo will provide you with years (if not decades) of outdoor comfort.
Types of Gazebos
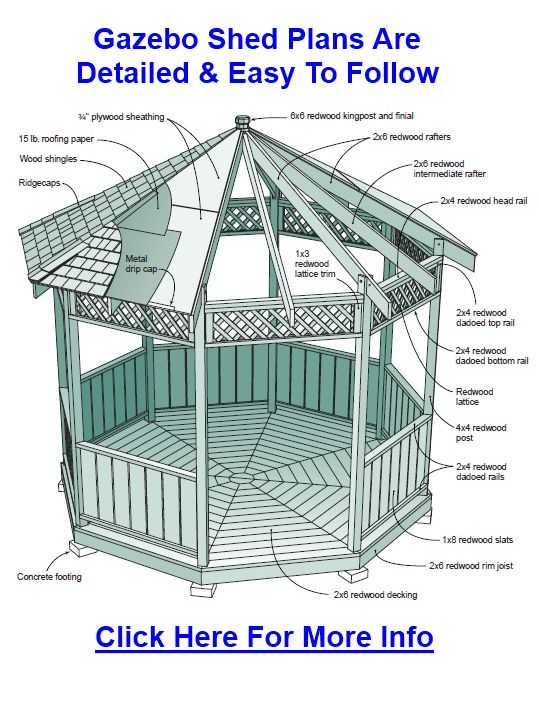
Wood Gazebos
There are several types of gazebos that are crafted with wood, however the type of wood matters. Amish Country Gazebos uses Southern Yellow Pine. It is strong, majestic, and durable.
Unlike many other designations for wood, the term «Southern Yellow Pine» does not refer to a single species of tree, but to a group of species. Southern Yellow Pines grow across a vast portion of the United States from Texas to Virginia.
Southern Yellow Pine is as versatile as it is strong. Used in the construction of homes, floors, decks, patios, boardwalks, and even roller coasters. The wood of the Southern Yellow Pine is an integral part of our daily lives. It is a simple truth, nothing beats the quality, aesthetic pleasure, and natural beauty of real wood.
Amish Country Gazebos uses only hand-selected, #1 grade, pressure-treated, twice kiln-dried, Southern Yellow Pine throughout our custom gazebos. Other companies will use #2 and #3-grade lumber where they think they can get away with it.
Integrating a robot into Gazebo
We’ll now take a look at some of the steps that could be taken in converting a robot (such as the one from the previous tutorial) to work with Gazebo.
For reference, the full code is shown here, the paragraphs below are to provide some further explanation:
Materials/Colour
Even if we specify the colours for RViz in our URDF using the tag, these won’t show up correctly in Gazebo. Instead, we need to use a tag for each link, with its own tag, specifying an appropriate material (Gazebo comes with a bunch, you can click here and search for to see what they are).
Publishing joint states and running controllers
Once the robot is spawned inside Gazebo, there are two key things the simulator needs to do to integrate with the broader ROS system:
- Simulate virtual actuators based on some kind of command input
- Publish the resulting joint positions/angles to the topic
Then, will have the information it needs to broadcast all the transforms.
As we saw earlier, the way to achieve this is through a plugin. The most common and powerful plugin for these tasks is . It is designed as part of a broader system called , which is a modular system that allows for easy reuse of controllers between the simulated and real version of a robot, or even between different robots.
Although is a great plugin which can do both of those tasks, it can be confusing for beginners and will require a whole tutorial of its own. There are other plugins out there that achieve these tasks in different ways, and the ones used in the demonstration video are simpler ones that come bundled with the gazebo-ros libraries.
An example of the plugin used in the video to publish joint states from Gazebo:
And for joint control:
After restarting Gazebo we should see the robot represented correctly in tools like RViz as the transforms are now working. Running the command below will set the joints to the values at the end (so for and for ).
If the robot is “flopping” around too much, try adding some damping to the joints in the original URDF ( and ) with this tag:
Sensors
Gazebo has the ability to simulate sensors and publish their outputs to ROS topics. Each sensor must be attached to a link, so we need to add a tag inside the Gazebo reference tag we want to add it to. The exact implementation will be different for every sensor so we won’t go into them all now, but for each one we need to specify the sensor type, the plugin required to connect it to ROS, and any parameters the sensor or the plugin require.
Here’s an example of a sensor tag that we might use to simulate a lidar (called a “ray sensor” in Gazebo), the sample code earlier demonstrates a full config for a depth camera.
We’ll tackle different sensor types in future projects, but if you want more info, check out:
- Gazebo tutorial on ROS plugins (ROS 1 oriented)
- GitHub wiki for the plugins (including ROS 2 migration)
Better Worlds
When we first launch gazebo the world is pretty boring — just a big flat plane. Thankfully there are some things we can do to make it a bit more interesting, here is just a start.
Adding objects
We can click the “Insert” tab in the top-left corner to add new models. This will find models that we have stored locally (in certain locations) as well as models from an online database. Each time we start up Gazebo it reloads these databases which can take a long time — so we just need to be patient. Adding a model for the first time can be slow as it pulls it from online. Once we’ve added a model it should be saved to our local collection (at the top of the list) where we can add it quickly, but this doesn’t always work correctly.
Using the Building/Model editors
Under the edit menu we find the Building Editor and Model Editor. It’s a little confusing — these both let us create models — but they do it in different ways.
The model editor lets us combine primitive shapes and existing models together to create new models. The building editor lets us draw a floor plan to generate walls, which we can add colour and texture to, and save the resulting set of walls as its own model.
With both of these tools we need to save our new model before we exit, and the resulting model will be added to our scene and also saved to be reused in future worlds.
Using the built-in worlds
There are some built-in worlds in (such as the seesaw demo from earlier) however many of these are designed to demonstrate particular features or plugins, rather than being a general environment ( is an example of a good one).
Using models and worlds others have made
Gazebo has been around for a while and there are many models and worlds out there that others have made for us to use. It’s worth taking a look around for what is out there (although be aware that you may occasionally run into compatibility issues with different versions). Some of these can be conveniently installed using , others we need to just download the files ourselves.
Some possible sources for worlds (not all tested) are:
- AWS Robotics Github
- Turtlebot worlds (install and look under )
- Clearpath Robotics here and here (these may be dependent on other packages)
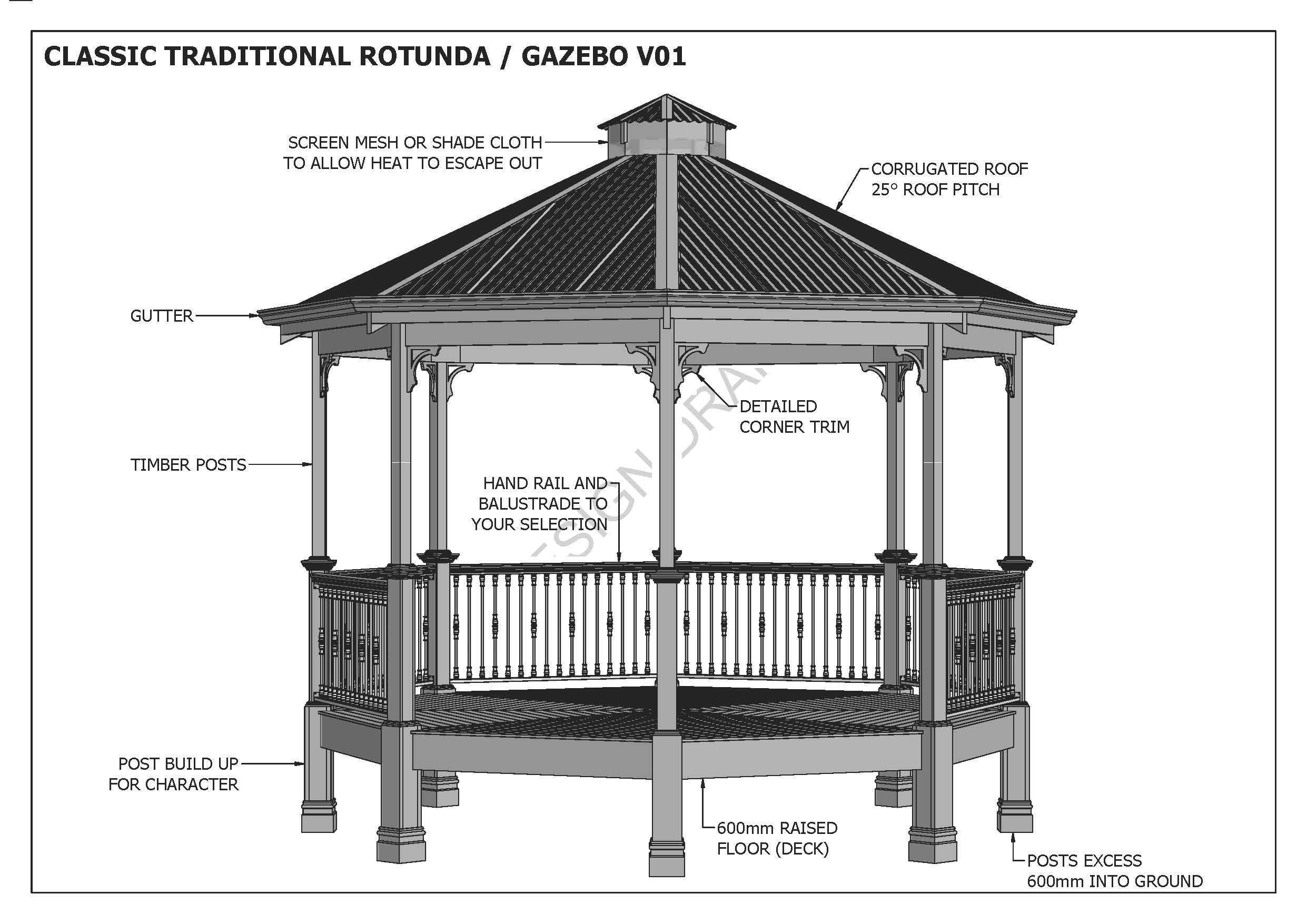
Gazebo Basics
Materials
Gazebos tend to be made out of wood, vinyl, or aluminum, but if you choose the custom route, you may see steel, wrought iron, concrete, and even stone! Like most structures, if you’re willing to pay for it, you can have your gazebo built out of just about anything.
Wood is the most popular option in North America, partially due to the availability of lumber. Pine and cedar are popular wood specimens used to construct gazebos, and of course, many other types of outdoor structures.


Shapes
Most kits and gazebo plans tend to be hexagonal or octagonal, depending on size, but there are a number of other options for your gazebo, including square, oval, round, and even dodecagonal, which has twelve sides.
Common shapes for gazebos include:
- Round
- Square
- Rectangular
- Oval
- Hexagonal
- Octagonal
- Decagonal
- Dodecagonal
How much do gazebos cost?
Gazebo kits are available for as low as $500. These are typically pop-up portable units that are great for camping or for homeowners on a budget. Pre-fabricated wooden gazebos can cost a couple thousand dollars depending on size and material.
A nine foot wooden gazebo, for example, will probably run you between $1,500 and $2,500. A vinyl structure of the same size will cost a tad more, around $2,100 to $3,600. You’ll pay more for a vinyl gazebo due to the difference in durability between the two.
Metal gazebos are typically made from affordable aluminum or durable steel, which tends to be more expensive.
There are also some surprise costs associated with building a gazebo. If you want an enclosed gazebo, be prepared to pay more in both materials and labor. You also may need to level your yard or have a concrete slab poured, so the gazebo sits flat on the ground.
It’s important to ensure that the contractor you choose includes the flooring cost in the final price to avoid any large surprise costs.
For a custom gazebo, expect to pay closer to $5,000 to $11,000. Luxury, enormous, high-end gazebos can run you as much as $40,000.
As you start looking at options, remember that if you see a very low price, check the listing, because the listing may only be selling the gazebo canopy.
(Source: Improvnet)
Sizes
Gazebos come in all kinds of sizes, but the standard size for a typical backyard is 12 feet by 12 feet. Other popular sizes include 12 feet by 14 feet and 14 feet by 14 feet.
Of course, you can go bigger if you want, but you shouldn’t go too much smaller than the standard size to ensure you have enough space for all of your guests.
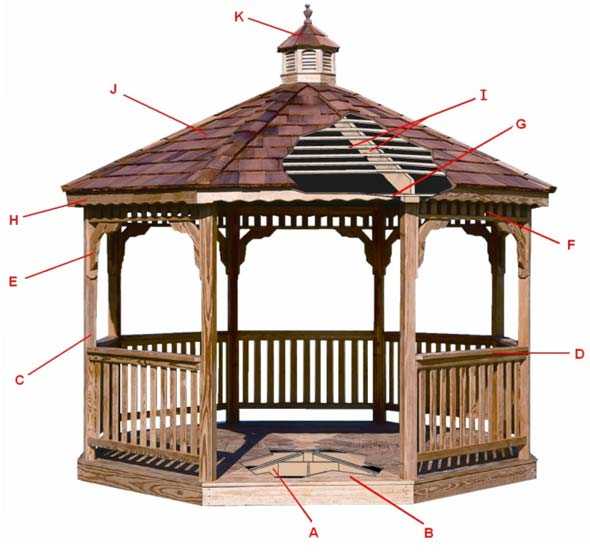
Common Features
There are many design elements you can choose from to add charm and function to your patio or outdoor living space. Consider these common structural features of gazebos.
Learn more here.
Teleoperation of your robot
Ok you can control joints individually, but that’s not so convenient when you want to make your mobile robot move around. Let’s use another plugin called differential drive to make it easier. Add this in the gazebo file of your model :
This plugin will subscribe to the cmd_vel topic specified with the « commandTopic » tag and convert the messages to the proper commands on the wheels. It also provides some odometry data.
Now, you can start gazebo with the usual launch file.
To teleoperate your robot with the keybord you can use a teleoperation node as provided in turtlesim or turtlebot packages. We just need to remap the topic name to connect it to our robot :
Enjoy the ride !